The IMU is a crucial component for attitude determination. We use the new TDK “ICM-20948” Integrated circuit, which has Nine-Axis (Gyro + Accelerometer + Compass).
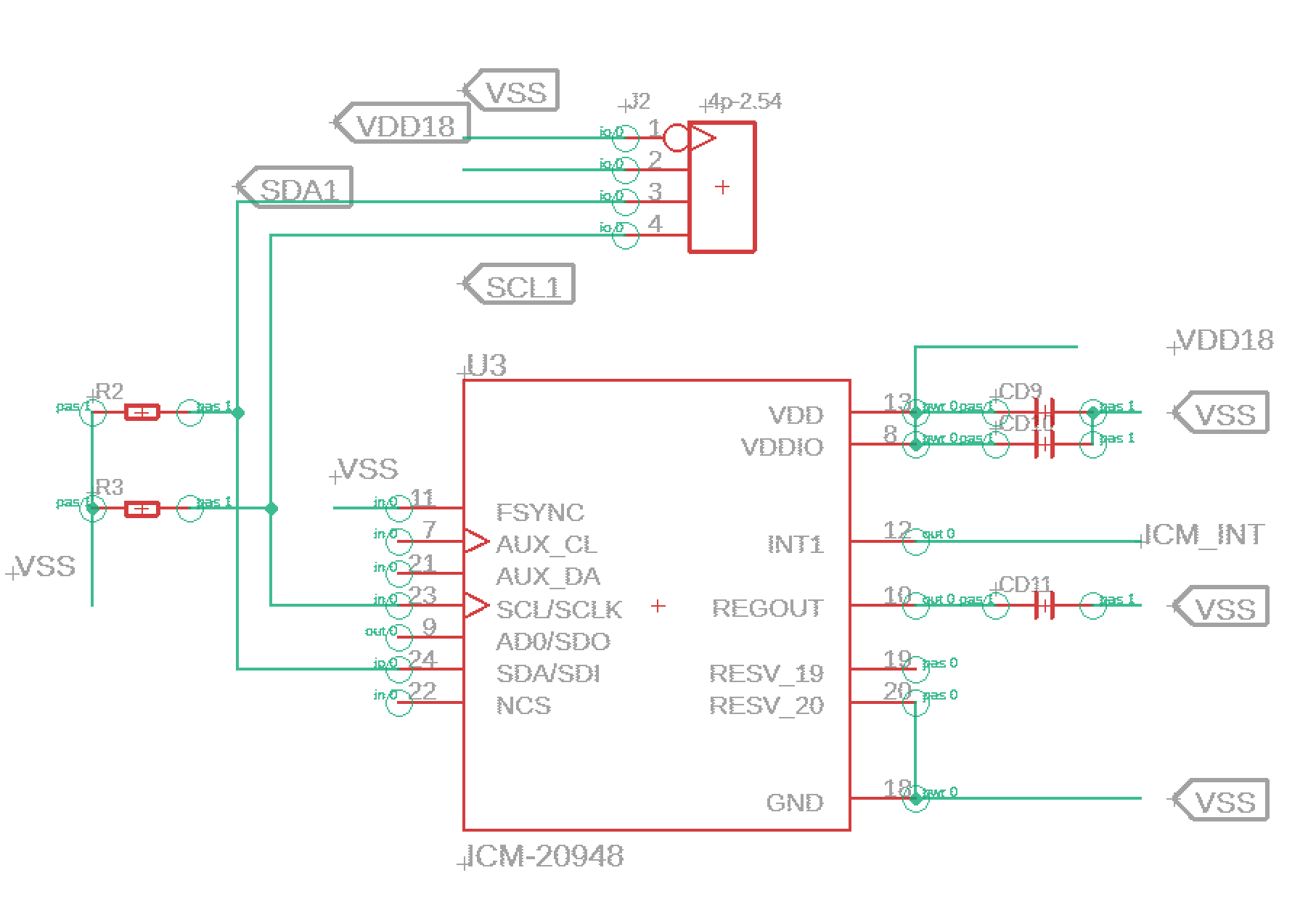
With this, we can know our orientation from the magnetic field, ratation information and we hope to even measure acceleration. TDK claims it is the “World’s Lowest Power 9-Axis MEMS MotionTracking Device”. Therefore, we drive it with our 1.8V bus. Because we do not need the fastest bus, we chose I2C, which also has a low power consumption and the possiblitiy of attaching multiple sensors to the same bus. The used schematic is shown below. It also shows the deblocking capacitors, a part of the I2C bus and connector and an interrupt connector, which allows to forward interrupts to the main processor.